orca-robotics

INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
REPOSITORY
Interfaces
Components
Libraries
Utilities
Software Map
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
Wiki
login/pass: orca/orca
PEOPLE
Contributors
Users
Project
Download
Mailing lists
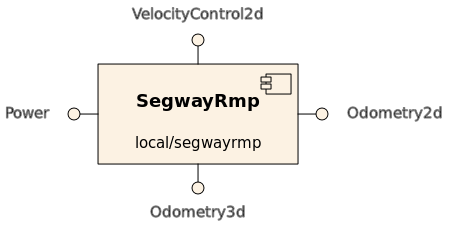
SegwayRmp
[Components, Stand-Alone Components, IceBox Services, C++, Linux, QNX]
Controls Segway RMP: a two-wheeled balancing robot.
More...- Provides
- Home
- Odometry2d [SegwayRmp.Provides.Odometry2d]
- Odometry3d [SegwayRmp.Provides.Odometry3d]
- VelocityControl2d [SegwayRmp.Provides.VelocityControl2d]
- Power [SegwayRmp.Provides.Power]
- EStop
- Status
- Tracer
- Drivers
- Configuration
SegwayRmp.Config.DriverLib(string)- Name of shared library containing the hardware driver
- Valid options are { 'libHydroSegwayRmpAcfrCan.so', 'libHydroSegwayRmpAcfrUsb.so', 'libHydroSegwayRmpPlayerClient.so', 'libHydroSegwayRmpFake.so' }
- Default: 'libHydroSegwayRmpAcfrCan.so'
SegwayRmp.Config.EnableMotion(bool)- Allow motion commands or not. Convinient for testing when you want to make sure that the platform will not move.
- Default: 1
SegwayRmp.Config.DriveInReverse(bool)- If set, reverse all controls and odometry (to all the RMP to be driven in reverse as though it were driving forward).
- Default: 0
SegwayRmp.Config.Odometry2dPublishInterval(double) [s]- How often to send 2D odometry information to the IceStorm server
- Valid values:
- t<0 : send every new data point
- t>0 : send approximately every t seconds
- Default: 0.1 (10Hz)
SegwayRmp.Config.ProvideOdometry3d(bool)- Whether or not to update the Odometry3d interface
- Default: 1
SegwayRmp.Config.Odometry3dPublishInterval(double) [s]- How often to send 3D odometry information to the IceStorm server (iff ProvideOdometry3d is set)
- Valid values:
- t<0 : send every new data point
- t>0 : send approximately every t seconds
- Default: 0.1 (10Hz)
SegwayRmp.Config.PowerPublishInterval(double) [s]- How often to send power information to the IceStorm server
- Valid values:
- t>0 : send approximately every t seconds
- Default: 20.0
SegwayRmp.Config.StatusPublishInterval(double) [s]- How often to send status information to the IceStorm server
- Valid values:
- t>0 : send approximately every t seconds
- Default: 60.0
SegwayRmp.Config.EnableEStop(bool)- If true, instantiate monitor the EStop interface.
- Default: 0
SegwayRmp.Config.EStop.KeepAlivePeriodSec(double) [s]- How frequently keep-alives need to arrive to keep the vehicle happy.
- Default: 3
Parameters describing the vehicle (see orca::VehicleDescription for details)
SegwayRmp.Config.VehicleDescription.Control.Type(string)- valid values: 'VelocityDifferential'
- Default: 'VelocityDifferential'
SegwayRmp.Config.VehicleDescription.Control.VelocityDifferential.MaxForwardSpeed(m/s)- Default: 1.0
SegwayRmp.Config.VehicleDescription.Control.VelocityDifferential.MaxReverseSpeed(m/s)- valid values: must be same as forward speed.
- Default: 1.0
SegwayRmp.Config.VehicleDescription.Control.VelocityDifferential.MaxTurnrate(deg/s)- Absolute max turnrate (assumed max turnrate at 0m/s)
- Default: 45.0
SegwayRmp.Config.VehicleDescription.Control.VelocityDifferential.MaxLateralAcceleration(m/s/s)- Max centripital acceleration during a turn (limits max turnrate at speed).
- Default: 4.9050
SegwayRmp.Config.VehicleDescription.Control.VelocityDifferential.MaxForwardAcceleration(m/s/s)- Default: 1.0
SegwayRmp.Config.VehicleDescription.Control.VelocityDifferential.MaxReverseAcceleration(m/s/s)- Default: 1.0
SegwayRmp.Config.VehicleDescription.Control.VelocityDifferential.MaxRotationalAcceleration(deg/s/s)- Default: 45.0
SegwayRmp.Config.VehicleDescription.PlatformToVehicleTransform(Frame3d) [m, deg]- Position of the vehicle's local coord system with respect to the platform's local coord system.
- Format: x y z roll pitch yaw (space separated)
- Default: 0.0 0.0 0.0 0.0 0.0 0.0
SegwayRmp.Config.VehicleDescription.Geometry.Type(string)- valid values: 'Cylindrical'
- Default: 'Cylindrical'
SegwayRmp.Config.VehicleDescription.Geometry.Cylindrical.Radius(m)- Radius of the vehicle's bounding cylinder
- Default: 0.25
SegwayRmp.Config.VehicleDescription.Geometry.Cylindrical.Height(m)- Height of the vehicle's bounding cylinder
- Default: 1.0
SegwayRmp.Config.VehicleDescription.Geometry.Cylindrical.VehicleToGeometryTransform(Frame3d) [m, deg]- Position of the cylinder centre with respect to the vehicle's local coord system. (cylinder extends in +/- z direction from here)
- Format: x y z roll pitch yaw (space separated)
- Default: 0.0 0.0 0.0 0.0 0.0 0.0
- See also:
- Individual drivers may have additional configuration parameters which are specified as SegwayRmp.Config.XXX. See driver documentation.
- Authors
