orca-robotics

INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
REPOSITORY
Interfaces
Components
Libraries
Utilities
Software Map
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
Wiki
login/pass: orca/orca
PEOPLE
Contributors
Users
Project
Download
Mailing lists
Download and Install Orca
- Note:
- Reviewed for release 2.10.0.
Overview of dependencies
The diagram below shows an overview of dependencies between Orca/Hydro and external libraries. Dependencies are indicated by dashed arrows. Note that GearBox as a whole does not have any "official" dependencies but the libraries used by Orca/Hydro require libIceUtil.
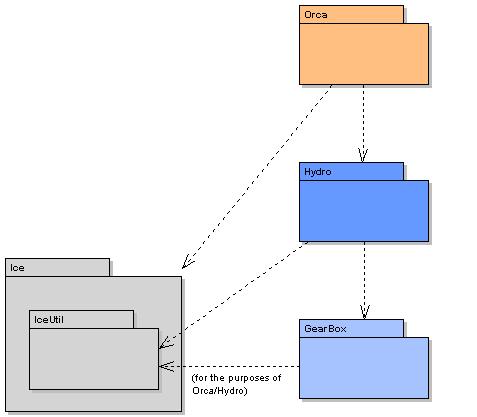
For Orca users this dependency structure means that 4 packages need to be installed in the following order: Ice, GearBox, Hydro, Orca. The first one is distributed as binaries for many systems and the last three share the same build system, which simplifies installation. The instructions below step you through the process.
Download instructions for Hydro and Orca
- Option 1. Download the latest distributions of GearBox and Hydro and Orca
- Option 2. Checkout source from SVN
- Anonymous checkout (if you want to commit something later you'll be prompted for username/password):
$ svn co https://gearbox.svn.sf.net/svnroot/gearbox/gearbox/trunk gearbox $ svn co https://orca-robotics.svn.sf.net/svnroot/orca-robotics/hydro/trunk hydro $ svn co https://orca-robotics.svn.sf.net/svnroot/orca-robotics/orca/trunk orca
- See links to get started with SVN.
- See more detailed SourceForge SVN instructions.
- Anonymous checkout (if you want to commit something later you'll be prompted for username/password):
Installation instructions
Detailed instructions are available for these platforms/distributions (each page indicates for which version these instructions were updated, out-of-date instructions may not be very useful):- Debian Linux (also tested with Ubuntu/Kubuntu)
- Fedora Linux
- QNX Neutrino
- Windows XP
- Send feedback on building under other configurations.
The instructions below are quite general, follow them if your platform/distribution combination is not described above:
- Download and install CMake: Cross-Platform Make which is used to build the orca distribution.
- Minimum version required 2.4-patch 4 (latest tested: 2.4-patch 8).
- Full instructions are available from the download page.
- Download and install Ice libraries.
- Minimum version required 3.2.0 (latest tested: 3.2.1)
- Full instructions are available from the download page. Several binaries distributions exists, for others building from source may be required.
- Download and install any optional dependencies you'd like. Or just skip this step and do it later.
- Player/Stage, is required for some hardware support and for use of the Stage simulator (you probably want this).
- For version requirements see individual component documentation.
- Qt is a cross-platform framework for building GUI's. Some components are GUI-only and some have optional GUI drivers.
- Minimum version required 4.2.0 (latest tested: 4.3.4)
- Player/Stage, is required for some hardware support and for use of the Stage simulator (you probably want this).
- Build and install GearBox distribution.
- Un-tar the archive, configure using CMake, compile and install
- Build and install Hydro distribution.
- Un-tar the archive, configure using CMake, compile and install
- Build and install Orca distribution.
- Un-tar the archive, configure using CMake, compile and install
- Make sure that all executables are in the path.
Installation process can be customized with a few variables which can be supplied on the command-line, e.g.
$ cmake -D[VARIABLE_NAME]=[VARIABLE_VALUE] .
The following are the names of available variables for each distribution:
- GearBox
- GEARBOX_INSTALL - where to install GearBox installation, e.g. "cmake -DGEARBOX_INSTALL=/home/myuser/temp ."
- ICEUTIL_HOME - where to find IceUtil installation, e.g. "cmake -DICEUTIL_HOME=/home/myuser/temp ."
- Hydro
- HYDRO_INSTALL - where to install Hydro installation, e.g. "cmake -DHYDRO_INSTALL=/home/myuser/temp ."
- ICEUTIL_HOME - where to find IceUtil installation, e.g. "cmake -DICEUTIL_HOME=/home/myuser/temp ."
- GEARBOX_HOME - where to find Gearbox installation, e.g. "cmake -DGEARBOX_HOME=/home/myuser/temp ."
- Orca
- ORCA_INSTALL - where to install Orca, e.g. "cmake -DORCA_INSTALL=/home/myuser/temp ."
- ICE_HOME - where to find Ice installation, e.g. "cmake -DICEUTIL_HOME=/home/myuser/temp ."
- GEARBOX_HOME - where to find Gearbox installation, e.g. "cmake -DGEARBOX_HOME=/home/myuser/temp ."
- HYDRO_HOME - where to find Hydro installation, e.g. "cmake -DHYDRO_HOME=/home/myuser/temp ."
