orca-robotics

INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
REPOSITORY
Interfaces
Components
Libraries
Utilities
Software Map
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
Wiki
login/pass: orca/orca
PEOPLE
Contributors
Users
Project
Download
Mailing lists
Quick-Start Guide
- Note:
- Reviewed for release 2.10.0.
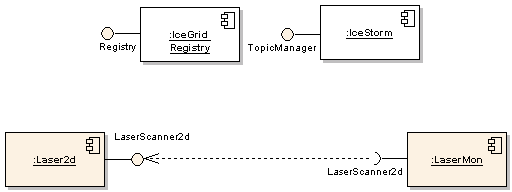
The system which we will assemble is shown in the diagram below. It consists of two infrastructure applications (IceGrid Registry and IceStorm) and two Orca components (Laser2d and LaserMon).
Starting Up the Infrastructure
We'll be using sample configuration files which are distributed with Orca. As the general rule, you shouldn't work or run programs from the distribution. So we'll create separate directories for each project (or tutorial) and copy config files into it. Will put all of these directories into one place: a new directory we'll callsys in the home directory. $ mkdir ~/sys
- IceGrid Registry
$ mkdir -p ~/sys/icereg; cd ~/sys/icereg $ cp [ORCA-SRC]/scripts/ice/icegridregistry.cfg . $ mkdir db $ icegridregistry --Ice.Config=icegridregistry.cfg
This starts icegridregistry on your local machine. If you're going to be using Orca a lot, it's probably a good idea to set this up so it's always running on a single machine on the network.
- IceStorm Service
- Note:
- For Debian/Ubuntu users: See an entry in the Wiki FAQ on 127.0.1.1 in the /etc/hosts file.]
- Note:
- If you are using a version of Ice different from the one we recommend you will need to change the version number of IceStormService in the
icebox_icestorm.cfgfile (e.g. replace32with31to go back from v.3.2.0 to 3.1.0).
$ mkdir -p ~/sys/icestorm; cd ~/sys/icestorm $ cp [ORCA-SRC]/scripts/ice/icebox_icestorm.cfg . $ mkdir stormdb $ icebox --Ice.Config=icebox_icestorm.cfg
Pointing Components at this Infrastructure
When an Orca component starts up, it needs to know how to find the services above. This information can go into config files for individual components.
Components in this tutorial use libOrcaIce, which looks up this information in a single file configuration file. Create a file ~/.orcarc (in your home directory) and place this text into it:
# Standard Ice Configuration for Orca Ice.Default.Locator=IceGrid/Locator:default -p 12000
Getting Two Components Talking
Now will connect a fake laser component to a laser monitoring component. First, copy default configuration files for the Laser2d and LaserMon components.$ mkdir -p ~/sys/quickstart; cd ~/sys/quickstart $ cp [ORCA-INSTALL]/share/orca/cfg/laser2d.cfg . $ cp [ORCA-INSTALL]/share/orca/cfg/lasermon.cfg .
- The Server
laser2d.cfg, and replace the default library name 'libHydroLaserScanner2dSickCarmen.so' with 'libHydroLaserScanner2dFake.so', so it looks like this:
Laser2d.Config.DriverLib=libHydroLaserScanner2dFake.so.so
Start the Laser2d component.
$ laser2d laser2d.cfg
- The Client
lasermon.cfg. By default, all Orca components assume componentname.cfg as an argument if nothing is specified.
$ lasermon
You should see the scans scroll by on the screen. Congratulations, your first two components are talking!
To stop components, type Ctrl-C.
If something does not work, check out the FAQ on Orca Wiki.
