orca-robotics

INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
REPOSITORY
Interfaces
Components
Libraries
Utilities
Software Map
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
Wiki
login/pass: orca/orca
PEOPLE
Contributors
Users
Project
Download
Mailing lists
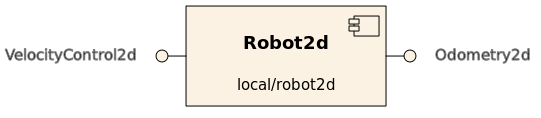
Robot2d
[Components, Stand-Alone Components, IceBox Services, C++, Linux, QNX]
Controls a 2-D mobile robot.
More...- Provides
- Home
- Odometry2d [Robot2d.Provides.Odometry2d]
- VelocityControl2d [Robot2d.Provides.VelocityControl2d]
- Status
- Tracer
- Requires
- none
- Drivers
- playerclient Player Client driver
- fake Useful for testing or if you don't have hardware or a simulator.
- Configuration
Robot2d.Config.Driver(string)- Type of hardware driver
- Valid values: { 'playerclient', 'fake' }
- Default: 'playerclient'
Robot2d.Config.EnableMotion(bool)- Allow motion commands or not. Convinient for testing when you want to make sure that the platform will not move.
- Default: 1
Robot2d.Config.Odometry2dPublishInterval(double) [s]- How often to send position information to the IceStorm server
- Valid values:
- t<0 : send every new data point
- t>0 : send approximately every t seconds
- Default: 0.1 (10Hz)
Parameters describing vehicle (see orca::VehicleDescription for details)
Robot2d.Config.VehicleDescription.Control.Type(string)- valid values: 'VelocityDifferential'
- Default: 'VelocityDifferential'
Robot2d.Config.VehicleDescription.Control.VelocityDifferential.MaxForwardSpeed(m/s)- Default: 1.0
Robot2d.Config.VehicleDescription.Control.VelocityDifferential.MaxReverseSpeed(m/s)- valid values: must be same as forward speed.
- Default: 1.0
Robot2d.Config.VehicleDescription.Control.VelocityDifferential.MaxTurnrate(deg/s)- Absolute max turnrate (assumed max turnrate at 0m/s)
- Default: 60.0
Robot2d.Config.VehicleDescription.Control.VelocityDifferential.MaxLateralAcceleration(m/s/s)- Max centripital acceleration during a turn (limits max turnrate at speed).
- Default: 3.57
Robot2d.Config.VehicleDescription.Control.VelocityDifferential.MaxForwardAcceleration(m/s/s)- Default: 1.0
Robot2d.Config.VehicleDescription.Control.VelocityDifferential.MaxReverseAcceleration(m/s/s)- Default: 1.0
Robot2d.Config.VehicleDescription.Control.VelocityDifferential.MaxRotationalAcceleration(deg/s/s)- Default: 45.0
Robot2d.Config.VehicleDescription.PlatformToVehicleTransform(Frame3d) [m, deg]- Position of the vehicle's local coord system with respect to the platform's local coord system.
- Format: x y z roll pitch yaw (space separated)
- Default: 0.0 0.0 0.0 0.0 0.0 0.0
Robot2d.Config.VehicleDescription.Geometry.Type(string)- valid values: 'Cylindrical'
- Default: 'Cylindrical'
Robot2d.Config.VehicleDescription.Geometry.Cylindrical.Radius(m)- Radius of the vehicle's bounding cylinder
- Default: 0.25
Robot2d.Config.VehicleDescription.Geometry.Cylindrical.Height(m)- Height of the vehicle's bounding cylinder
- Default: 1.0
Robot2d.Config.VehicleDescription.Geometry.Cylindrical.VehicleToGeometryTransform(Frame3d) [m, deg]- Position of the cylinder centre with respect to the vehicle's local coord system. (cylinder extends in +/- z direction from here)
- Format: x y z roll pitch yaw (space separated)
- Default: 0.0 0.0 0.0 0.0 0.0 0.0
An example configuration file is installed into [ORCA-INSTALL-DIR]/share/orca/cfg/ directory.
- Dependancies
Player Client driver
This driver wraps up a Player client which connects to Player's Position2d interface. As such it can be used as a quick-and-easy way to interact with virtually all robotic platforms supported by Player. Naturally, both real hardware and Stage simulator are supported. It requires a running Player server. The driver gets data from that server and converts it into Orca format.
- Dependancies
- Extra configuration
Robot2d.Config.PlayerClient.Host(string)- The host that Player (or Stage) is running on
- Default: "localhost"
Robot2d.Config.PlayerClient.Port(int)- The port that PLayer (or Stage) is running on
- Constraints: >0
- Default: 6665
Internal Structure
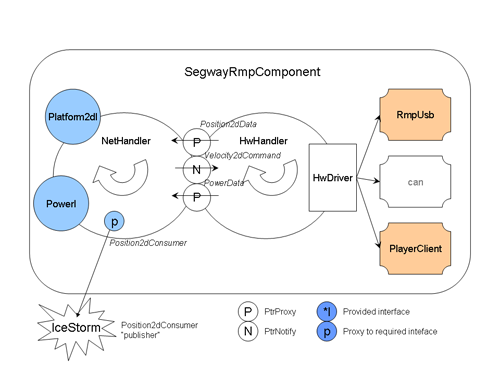
The implementation of Platform2d interface can raise orca::DataNotExistException but does NOT raise orca::HardwareFailedException.
- Authors
