orca-robotics

INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
REPOSITORY
Interfaces
Components
Libraries
Utilities
Software Map
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
Wiki
login/pass: orca/orca
PEOPLE
Contributors
Users
Project
Download
Mailing lists
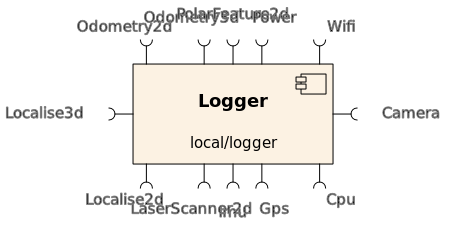
Logger
[Utilities, Stand-Alone Components, IceBox Services, C++, Linux]
Logs data and configurations from interfaces.
More...- Provides
- Requires (any number and combination of the following)
- Camera [Logger.Requires.CameraX]
- Cpu [Logger.Requires.CpuX]
- DriveBicycle [Logger.Requires.DriveBicycleX]
- Gps [Logger.Requires.GpsX]
- LaserScanner2d [Logger.Requires.LaserScanner2dX]
- Localise2d [Logger.Requires.Localise2dX]
- Localise3d [Logger.Requires.Localise3dX]
- PolarFeature2d [Logger.Requires.PolarFeature2dX]
- Odometry2d [Logger.Requires.Odometry2dX]
- Odometry3d [Logger.Requires.Odometry3dX]
- Power [Logger.Requires.PowerX]
- Operation
Logger class that handles incoming data and writes them to one file each (e.g. for the LaserScanner2d interface, the LaserScanner2dLogger class writes data to laserscanner2d0.log). Data is received by either pulling data e.g. with getData() or by subscribing for data pushes e.g. with subscribe().
- See also:
- LogPlayer
- Configuration
Logger.Requires.Laser0.Proxy=laserscanner2d@alpha/laser2d Logger.Requires.Laser1.Proxy=laserscanner2d@bravo/laser2d Logger.Requires.Odometry2d0.Proxy=odometry2d@local/segwayrmp
Logger.Config.FactoryLibNames(string)- A space-separated list of libraries containing slave factories.
- This list is ordered. Putting a custom library earlier in the list means that it will be used to instantiate slaves before later factories.
- Default: libOrcaLogFactory.so
Logger.Config.FilenameTimestamp(bool)- If set to one, creation timestamp is pre-pended to the filenames of the master and log files. Time stamp format is YYMMDD_HHMMSS, e.g. the default master file becomes 060804_153321_master.log. This is usful to avoid accidently overwriting the files when restarting the logger.
- Default: 1
Logger.Config.<interfaceType><number>.Format (string)- Specifies the encoding format for the log file
- Valid values: common formats: {'ice', 'ascii'}. When format is 'ice', the data is logged in binary form and can be easily played back. It is not human-readable however. The 'ascii' format is human-readable but requires parsing to be interpreted. See "Details for specific interfaces" below for supported formats for individual interfaces.
- Default: 'ice'
- Example:
Logger.Config.Laser0.Format=ascii
- Logfile Format
060804_153321_master.log 060804_153321_laserscanner0.log 060804_153321_laserscanner1.log 060804_153321_camera0.log
The first records in each subfile are configuration data, after that all records are "pure" data. Subfiles are named according to the interfaces you're logging and have a number attached in case you want to log the same interface type several times (e.g. when logging several lasers). Don't change the file names because they are also recorded in the corresponding master file.
Subfiles contain the logged data. The Orca Logger supports two different encoding types {'ice', 'ascii'} which can be configured on a per-interface basis. 'ice' produces binary files which are generated by Slice's built-in streaming functionality. The disadvantage is that they are not human-readable. 'ascii' produces human-readable ascii files but the streaming functions need to be implemented manually which is error-prone. They are useful because they can be easily parsed (e.g. using Matlab).
Details are given on a separate page: Orca log format
- Details for specific interfaces
- orcalogfactory::DriveBicycleLogger
- orcalogfactory::LaserScanner2dLogger
- orcalogfactory::Localise2dLogger
- orcalogfactory::Localise3dLogger
- orcalogfactory::Odometry2dLogger
- Parsing log files
To parse the 'ascii' log files in Matlab, you can use the files provided in [ORCA_SRC]/scripts/matlab/logutils/parse<interfaceType>data.m. Usage information is provided through matlab help:
>> help parse<interfaceType>data
- Authors
- Tobias Kaupp, Alex Brooks, Alexei Makarenko
Writing custom loggers
In order to instantiate interface loggers, the Logger utility dynamically loads libraries using logger factory. New factories can be written for the interfaces which are not in the Orca distribution. This plug-in architecture allows custom loggers to be written outside of the Orca project.
The default logger factory can be extended with new interfaces, e.g. MyInterface by executing the following steps:
- Create a
MyInterfaceSlaveclass which inherits fromSlaveand handles the interface-specific logging (e.g. streaming the data to the file). - Add a few lines of code to [ORCA_SRC]/src/utils/orcalogfactory/defaultlogfactory.cpp
- If logging to an 'ascii' file, update the orca_component_logger_formats page (and if you want to parse the 'ascii' log file using Matlab, add a script called [ORCA_SRC]/scripts/matlab/logutils/parse<MyInterface>.m).
- Update this documentation page.
To add a new plug-in slave factory, use orcalogfactory as an example. Compile the new factory into a .so, stick it somewhere in your LD_LIBRARY_PATH, and edit Logger.Config.FactoryLibNames to point to it.
