orca-robotics

INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
REPOSITORY
Interfaces
Components
Libraries
Utilities
Software Map
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
Wiki
login/pass: orca/orca
PEOPLE
Contributors
Users
Project
Download
Mailing lists
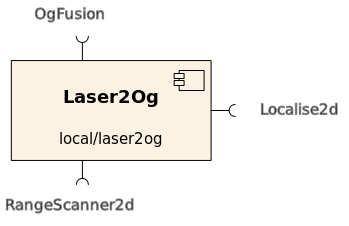
Laser2Og
[Components, Stand-Alone Components, IceBox Services, C++, Linux, QNX]
Generates Occupancy Grid cell likelihoods from raw range scans.
More...- Provides
- Requires
- Localise2d [Laser2Og.Requires.Localisation]
- OgFusion [Laser2Og.Requires.OgFusion]
- RangeScanner2d [Laser2Og.Requires.Observations]
- Operation
Note: can NOT generate likelihoods if Localise2d interface contains more than 1 hypothesis.
- Configuration
Laser2Og.Config.Sensor.Size(int)- Number of elements in sensor model
- Default: 101
Laser2Og.Config.Sensor.OccupMax(double)- Default: 0.575
Laser2Og.Config.Sensor.EmptyMax(double)- Default: 0.425
Laser2Og.Config.Sensor.RangeStDev(double) [m]- Range standard deviation
- Default: 0.1
Laser2Og.Config.Sensor.RangeStDevMax(double) [m]- Maximum range standard deviation
- Default: 3.0
Laser2Og.Config.Sensor.PosStDevMax(double) [m]- Maximum tolerated position uncertainty
- Default: 5.0
Laser2Og.Config.Sensor.HedStDevMax(double) [deg]- Maximum tolerated heading uncertainty
- Default: 5.0
- Authors
- Matthew Ridley
- Tobias Kaupp
