orca-robotics

INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
REPOSITORY
Interfaces
Components
Libraries
Utilities
Software Map
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
Wiki
login/pass: orca/orca
PEOPLE
Contributors
Users
Project
Download
Mailing lists
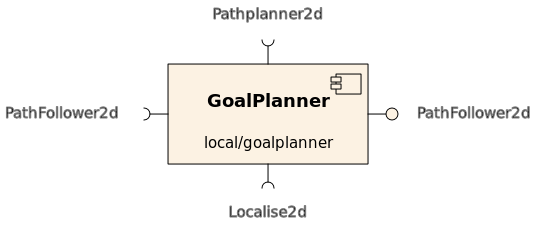
GoalPlanner
[Components, Stand-Alone Components, IceBox Services, C++, Linux, QNX, Windows]
Plans a path from where you are now to a goal.
More...
- Provides
- Home
- Status
- PathFollower2d [GoalPlanner.Provides.PathFollower2d]
- Requires
- Localise2d [GoalPlanner.Requires.Localise2d]
- PathFollower2d [GoalPlanner.Requires.PathFollower2d]
- PathPlanner2d [GoalPlanner.Requires.PathPlanner2d]
- OgMap [GoalPlanner.Requires.OgMap]
- Operation
You send it a path, it will consult with a PathPlanner2d interface to add intermediate waypoints so that a local path planner can follow it. The detailed path will then be forwarded to the lower-level PathFollower2d.
If you ask it what path was set, it'll give you the detailed path. If you subscribe() to the interface, it'll actually subscribe you directly to the low-level PathFollower2d interface.
The following happens in sequencential order in the mainloop:
- Wait for a "task" path which someone (e.g. OrcaView2d ) sends via the provided PathFollower2d interface.
- Work out how long it takes to get to the first waypoint based on a straight-line distance and adjust times of the task path accordingly.
- Prepend the current position of the robot to the task path.
- Send task path to the pathplanner and wait for an answer.
- Send out resulting, fine-grained path through the required PathFollower2d interface.
- Configuration
GoalPlanner.Config.VelocityToFirstWaypoint(double) [m/s]- Velocity to reach the first waypoint from the current pose.
- Default: 1.0
GoalPlanner.Config.PathPlanTimeout(double) [s]- Flag an error if it takes longer than this many seconds for the path planner to return a result.
- Default: 10.0
GoalPlanner.Config.CheckForStaleLocaliseData(bool)- Flag an error if the localiseData we're receiving is old compared to the system clock.
- Default: 0
- Authors
- Tobias Kaupp, Alex Brooks
