orca-robotics

INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
REPOSITORY
Interfaces
Components
Libraries
Utilities
Software Map
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
Wiki
login/pass: orca/orca
PEOPLE
Contributors
Users
Project
Download
Mailing lists
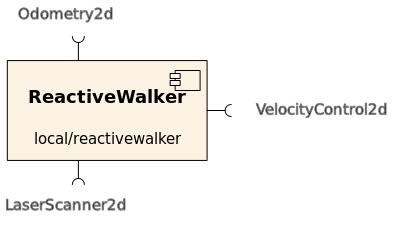
ReactiveWalker
[Examples, Stand-Alone Components, IceBox Services, C++, Linux]
Makes reactive motion control decisions based on odometry and laser scans.
More...- Provided Interfaces
- Required Interfaces
- Drivers
- random Random walk
- fake Useful for testing or if you don't have hardware or a simulator.
Implements simple reactive behaviors for mobile robotic platforms. The behavior depends on the chosen driver.
- Configuration
RandomWalker.Config.Driver(string)- Type of algorithm driver
- Valid values: { 'random', 'fake' }
- Default: 'random'
An example configuration file is installed into [ORCA-INSTALL-DIR]/share/orca/cfg/ directory.
Random walk
A port of Player's famous randomwalk example.
- Authors
- Alex Makarenko
