orca-robotics

INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
REPOSITORY
Interfaces
Components
Libraries
Utilities
Software Map
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
Wiki
login/pass: orca/orca
PEOPLE
Contributors
Users
Project
Download
Mailing lists
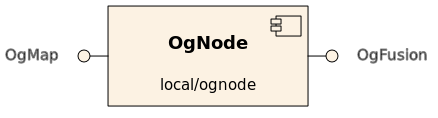
OgNode
[Components, Stand-Alone Components, IceBox Services, C++, Linux, QNX]
Fuses sequences of occupancy likelihoods.
More...- Provides
- Requires
- none
- Operation
- Configuration
OgNode.Config.PriorMapProxyString(string)- Proxy string of OgMap interface from which to get prior map
- If not equal to 'none', the details of the OgMap obtained from the remote interface will be used instead of the OgNode.Config.Map parameters.
- Default: none
OgNode.Config.Map.SizeXMetres(double) [m]- Size of map in metres (X)
- Default: 50.0
OgNode.Config.Map.SizeYMetres(double) [m]- Size of map in metres (Y)
- Default: 50.0
OgNode.Config.Map.ResX(double) [m]- The Map resolution in metres per Cell in X-direction
- Default: 0.5
OgNode.Config.Map.ResY(double) [m]- The Map resolution in metres per Cell in Y-direction
- Default: 0.5
OgNode.Config.Map.OriginX(double) [m]- The origin of the map (bottom-left corner) in metres (X)
- Default: -25.0
OgNode.Config.Map.OriginY(double) [m]- The origin of the map (bottom-left corner) in metres (Y)
- Default: -25.0
OgNode.Config.Map.Orientation(double) [deg]- The orientation of the map in degrees
- Default: 0.0
- Authors
- Matthew Ridley
