orca-robotics

INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
REPOSITORY
Interfaces
Components
Libraries
Utilities
Software Map
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
Wiki
login/pass: orca/orca
PEOPLE
Contributors
Users
Project
Download
Mailing lists
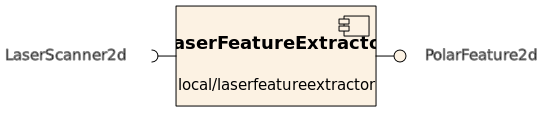
LaserFeatureExtractor
[Components, Stand-Alone Components, IceBox Services, C++, Linux]
Extracts interesting features from laser scans.
More...- Provides
- Home
- PolarFeature2d [LaserFeatureExtractor.Provides.PolarFeature2d]
- Status
- Requires
- LaserScanner2d [LaserFeatureExtractor.Requires.LaserScanner2d]
- Drivers
- Configuration
LaserFeatureExtractor.Config.DriverLib(string)- Name of shared library containing the driver
- Valid values are at least: { 'libHydroLaserFeatureExtractorCombined.so' }
- Default: "libHydroLaserFeatureExtractorCombined.so"
An example configuration file is installed into [ORCA-INSTALL-DIR]/share/orca/cfg/ directory.
- Authors
- Alex Brooks
