orca-robotics

INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
REPOSITORY
Interfaces
Components
Libraries
Utilities
Software Map
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
Wiki
login/pass: orca/orca
PEOPLE
Contributors
Users
Project
Download
Mailing lists
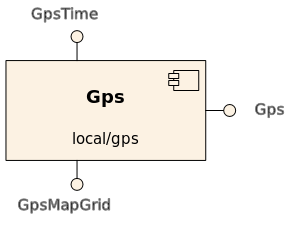
Gps
[Components, Stand-Alone Components, IceBox Services, C++, Linux]
A hardware abstraction component for GPS receivers.
More...- Provides
- Requires
- none
- Drivers
- Operation
It can run either as a stand-alone component or an IceBox Service.
- Features
- When subscribed to component, position will only be received if the GPS receiver has a fix.
- When requesting position, the user should check that the timestamp is not out of date as the last known position will always be returned iresepective of the GPS receiver currently having a valid fix.
- an orca::DataNotExistException will be thrown if getData() etc. is called without a fix ever having been achieved.
- Configuration
Gps.Config.DriverLib(string)- Name of shared library containing the hardware driver
- Valid values are at least: { 'libHydroGpsGarmin.so', 'libHydroGpsFake.so' }
- Default: "libHydroGpsGarmin.so"
Gps.Config.ReportIfNoFix(bool)- Report values if there is no GPS fix?
- 0: GPS doesn't provide any data when there is no fix
- 1: positionType is 0, all other values are bogus
- Default: 1
- Report values if there is no GPS fix?
Geometry
Gps.Config.AntennaOffset(Frame3d) [m,m,m,deg,deg,deg]- Offset of the GPS antenna from the vehicle's coordinate system.
- Format: x y z roll pitch yaw (space separated)
- Default: [0.0 0.0 0.0 0.0 0.0 0.0]
An example configuration file is installed into [ORCA-INSTALL-DIR]/share/orca/cfg/ directory.
- See also:
- Individual drivers may have additional configuration parameters which are specified as Laser2d.Config.XXX. See driver documentation.
- Authors
