orca-robotics

INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
REPOSITORY
Interfaces
Components
Libraries
Utilities
Software Map
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
Wiki
login/pass: orca/orca
PEOPLE
Contributors
Users
Project
Download
Mailing lists
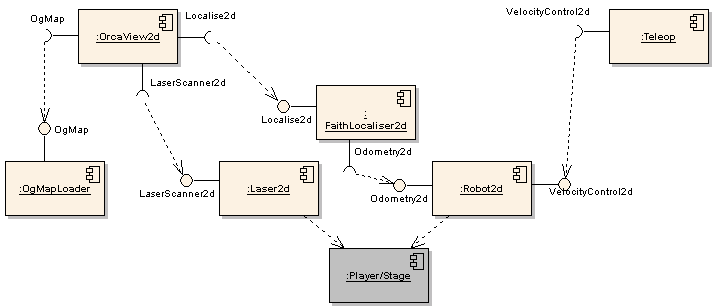
A bigger system with Player/Stage simulator
- Note:
- Reviewed for release 2.7.0.
In this tutorial we will use components which have external dependencies.
- Player/Stage to simulate the robotic platform. Debian installation instructions for Player can be found in Installing Orca on Debian Linux. This tutorial was tested with Player/Stage version 2.0.4.
- Qt for the GUI. Debian installation instructions are found here orca_doc_installdebian_qt
Starting Orca
Start IceGrid Registry and IceStorm server as described in the Quick-Start Guide.Create a new system directory and copy Orca sample files.
$ mkdir -p ~/sys/tutestage; cd ~/sys/tutestage $ cp [ORCA_INSTALL]/cfg/laser2d.cfg ./ $ cp [ORCA_INSTALL]/cfg/robot2d.cfg ./ $ cp [ORCA_INSTALL]/cfg/faithlocaliser.cfg ./ $ cp [ORCA_INSTALL]/cfg/teleop.cfg ./ $ cp [ORCA_INSTALL]/cfg/ogmaploader.cfg ./ $ cp [ORCA_INSTALL]/cfg/orcaview2d.cfg ./
In this tutorial we'll run 6 components. Each one will need a separate terminal. (Advanced: another option is to put all components into an application server called IceBox which runs them in a single process. See tutorial Running components inside the IceBox server.)
Starting Player/Stage
Copy Stage sample files.$ cp -r [STAGE-SRC]/worlds .
To simplify our localization, we'll make Stage report a global position in this simple world. To do this you need to add "localization" property to the worlds/pioneer.inc file
define pioneer2dx position ( ... localization "gps" localization_origin [0 0 0] )
Start up the Stage simulator with the simple world.
$ player worlds/simple.cfg
Platform components
- Laser scanner
laser2d.cfg: ... Laser2d.Config.NumberOfSamples=361 Laser2d.Config.DriverLib=libHydroLaserScanner2dPlayerClient.so Laser2d.Config.PlayerClient.Driver=stage ...
Now run the Laser2d component.
$ laser2d
- Robot hardware
robot2d.cfg file is already configured the way we want it here, so simply run the component:
$ robot2d
- Localisation
$ faithlocaliser
- Map of the world
ogmaploader.cfg file as shown. ... OgMapLoader.Config.MapFileName=./worlds/bitmaps/cave.png OgMapLoader.Config.Negate=0 OgMapLoader.Config.Origin.Orientation=0.0 OgMapLoader.Config.Origin.X=-8.0 OgMapLoader.Config.Origin.Y=-8.0 OgMapLoader.Config.Size.X=16.0 OgMapLoader.Config.Size.Y=16.0 ...
$ ogmaploader
View the world in the GUI
To view the world and the robot we use orca_component_orcaview2d component. One line of the standard config file needs to be modified:... OrcaView2d.Requires.Localise2d.Proxy=localise2d@local/faithlocaliser ...
$ orcaview2d
You should now see the the simple world from stage. If it is partially off the screen, drag it with the left mouse button so that you can view the full world. Resize the view with the right mouse button. You should be able to see the robot and the laser scans.
Keyboard/Joystick Control
To tell the robot to move we can use Teleop component, the same way it was done in the Driving a robot simulated with Player/Stage tutorial.$ teleop
As the robot moves through the world, compare the display of the OrcaView2d and the Stage world window: they should be identical.
