orca-robotics

INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
REPOSITORY
Interfaces
Components
Libraries
Utilities
Software Map
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
Wiki
login/pass: orca/orca
PEOPLE
Contributors
Users
Project
Download
Mailing lists
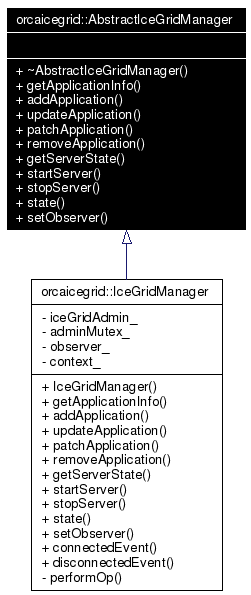
orcaicegrid::AbstractIceGridManager Class Reference
Creates and maintains an IceGrid admin session. More...
#include <abstracticegridmanager.h>
Inherited by orcaicegrid::IceGridManager.
Inheritance diagram for orcaicegrid::AbstractIceGridManager:
Public Member Functions | |
| virtual IceGrid::ApplicationInfo | getApplicationInfo (const std::string &appName, int timeoutMs=-1)=0 |
| Tells IceGrid to get app info. | |
| virtual void | addApplication (IceGrid::ApplicationDescriptor descriptor, int timeoutMs=-1)=0 |
| Tells IceGrid to add app from file. | |
| virtual void | updateApplication (IceGrid::ApplicationUpdateDescriptor descriptor, int timeoutMs=-1)=0 |
| Tells IceGrid to upadate app from file. | |
| virtual void | patchApplication (const std::string &appName, bool shutdown, int timeoutMs=-1)=0 |
| Tells IceGrid to patch app. | |
| virtual void | removeApplication (const std::string &appName, int timeoutMs=-1)=0 |
| Tells IceGrid to remove app. | |
| virtual IceGrid::ServerState | getServerState (const std::string &serverId, int timeoutMs=-1)=0 |
| Tells IceGrid to get server state. | |
| virtual void | startServer (const std::string &serverId, int timeoutMs=-1)=0 |
| Tells IceGrid to start server. | |
| virtual void | stopServer (const std::string &serverId, int timeoutMs=-1)=0 |
| Tells IceGrid to stop server. | |
| virtual IceGridManagerState | state ()=0 |
| Returns current state of the manager. | |
| virtual void | setObserver (IceGridManagerObserver *observer)=0 |
| There can be only one observer. | |
Detailed Description
Creates and maintains an IceGrid admin session.Defines convenient wrappers for a subset of operations provided by IceGrid::Admin interface.
All operations can set a timeout in [ms]. Default: no timeout. Note that because this timeout will be set explicitly, the standard Ice.Override.Timeout will not apply.
The implementation must be thread-safe.
- Author:
- Alex Brooks
The documentation for this class was generated from the following file:
