orca-robotics

INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
REPOSITORY
Interfaces
Components
Libraries
Utilities
Software Map
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
Wiki
login/pass: orca/orca
PEOPLE
Contributors
Users
Project
Download
Mailing lists
Logging interface data in text format
- Note:
- Reviewed for release 2.10.0.
Start up Orca and Player/Stage
Repeat the start up instructions of Driving a robot simulated with Player/Stage -- but this time IceStorm is not optional, it has to run.Create a new system directory and copy Orca sample files.
$ mkdir -p ~/sys/tutelogtxt; cd ~/sys/tutelogtxt $ cp [ORCA-INSTALL]/share/orca/cfg/robot2d.cfg . $ cp [ORCA-INSTALL]/share/orca/cfg/teleop.cfg . $ cp [ORCA-INSTALL]/share/orca/cfg/logger.cfg .
Robot component
Run the Robot2d component.
$ robot2d
Make sure that you can move the robot with Teleop (same as described in Driving a robot simulated with Player/Stage).
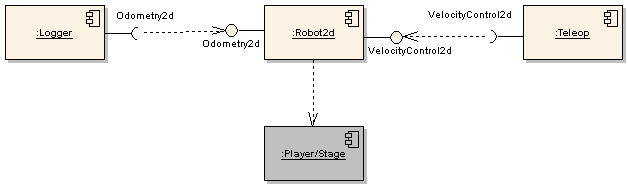
Odometry logger
The sample config file for the Logger contains a sample line for each supported interface. Most of them need to be deleted because we will log a single interface: orca::Odometry2d. The resulting config file is shown below.# Component
Logger.Platform=local
Logger.Component=logger
# Required Interfaces
Logger.Requires.Odometry2d0.Proxy=odometry2d@local/robot2d
# Configuration Options
# Valid values: {'auto', 'local', 'remote'}
Logger.Config.Driver=auto
Logger.Config.FactoryLibNames=libOrcaLogFactory.so
Logger.Config.FilenameTimestamp=0
Logger.Config.Odometry2d0.Format=ascii
A couple of things to note about this configuration:
- We are using the 'ascii' format which is human-readable.
- We've changed the
FilenameTimestampproperty to 0 for convenience. This way the timestamp will not be pre-pended to the filenames. In real-world usage enabling this option (by setting it to 1) is very useful because it reduces the chances of accidental deletion of log files.
Run the logger.
$ logger
Command the robot to move around. After a few seconds stop the logger and list the newly created log files.
$ ls *.log master.log odometry2d0.log
Examining log files
Lets examine the log files and compare their contents with the log file format described in the documentation of the Logger component.
- Master file
#data 1185086269 26512 0 0 1185086269 234753 0 1 1185086269 541920 0 2
- Interface log file
601 899999 1.3562 -0.236412 -34.8 0.25 0 -12
Now we can interpret the segment above. This data point was collected at the time 601 seconds and 899999 microseconds (this is Stage simulation time, not processor time). At that time, the odometric position of the robot was x=1.3562m, y=-0.236412m, theta=-34.8deg. The robot was moving with speed vx=0.25m/s, no cross speed, and turnrate=-12deg/s.
- Parsing in Matlab
