
INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
NONFRAMEWORK CODE
Driver Interfaces
Drivers
Libraries
Utilities
FRAMEWORK CODE
Interfaces
Components
Libraries
Utilities
Full Software Listings
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
PEOPLE
Contributors
Users
Project
Download
Mailing lists
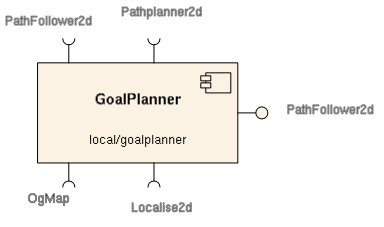
GoalPlanner
[Components, Stand-Alone Components, IceBox Services, C++, Linux, QNX, Windows]
Plans a path from where you are now to a goal. More...
Plans a path from where you are now to a goal.
The goalplanner plans a path from the current position of a robot to a global world coordinate (or a series of coordinates - a coarse path). It currently uses PathPlanner for planning. It sends the resulting fine path to a local navigator, e.g. LocalNav.
- Provides
- orca_interface_home
- orca_interface_status
- orca_interface_pathfollower2d [GoalPlanner.Provides.PathFollower2d]
- Requires
- orca_interface_localise2d [GoalPlanner.Requires.Localise2d]
- orca_interface_pathfollower2d [GoalPlanner.Requires.PathFollower2d]
- orca_interface_pathplanner2d [GoalPlanner.Requires.PathPlanner2d]
- orca_interface_ogmap [GoalPlanner.Requires.OgMap]
- Operation
GoalPlanner acts as a proxy for another PathFollower2d interface.
You send it a path, it will consult with a PathPlanner2d interface to add intermediate waypoints so that a local path planner can follow it. The detailed path will then be forwarded to the lower-level PathFollower2d.
If you ask it what path was set, it'll give you the detailed path. If you subscribe() to the interface, it'll actually subscribe you directly to the low-level PathFollower2d interface.
The following happens in sequencential order in the mainloop:
- Wait for a "task" path which someone (e.g. OrcaView2d ) sends via the provided PathFollower2d interface.
- Work out how long it takes to get to the first waypoint based on a straight-line distance and adjust times of the task path accordingly.
- Prepend the current position of the robot to the task path.
- Send task path to the pathplanner and wait for an answer.
- Send out resulting, fine-grained path through the required PathFollower2d interface.
- Configuration
GoalPlanner.Config.VelocityToFirstWaypoint(double) [m/s]- Velocity to reach the first waypoint from the current pose.
- Default: 1.0
GoalPlanner.Config.PathPlanTimeout(double) [s]- Flag an error if it takes longer than this many seconds for the path planner to return a result.
- Default: 10.0
GoalPlanner.Config.CheckForStaleLocaliseData(bool)- Flag an error if the localiseData we're receiving is old compared to the system clock.
- Default: 0
- Authors
- Tobias Kaupp, Alex Brooks
