orca-robotics

INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
REPOSITORY
Interfaces
Components
Libraries
Utilities
Software Map
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
Wiki
login/pass: orca/orca
PEOPLE
Contributors
Users
Project
Download
Mailing lists
Quick-Start Explained
- Note:
- Reviewed for release 2.3.0.
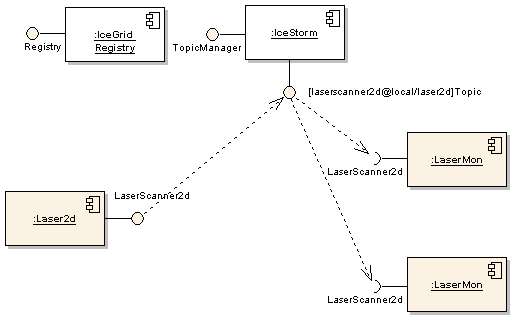
To make it more interesting we'll start the 2nd LaserMon and a new console window. Note that the config file we use implicitely is the same, lasermon.cfg.
$ cd ~/sys/quickstart $ lasermon
The resulting system looks like this.
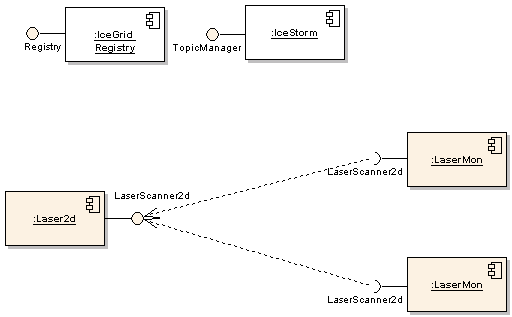
The next diagram shows the actual data flow in our system. The Laser2d component sends ("publishes") laser scans to the IceStorm event service which then distributes them to the subscribers, in this case the two LaserMon components.