orca-robotics

INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
REPOSITORY
Interfaces
Components
Libraries
Utilities
Software Map
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
Wiki
login/pass: orca/orca
PEOPLE
Contributors
Users
Project
Download
Mailing lists
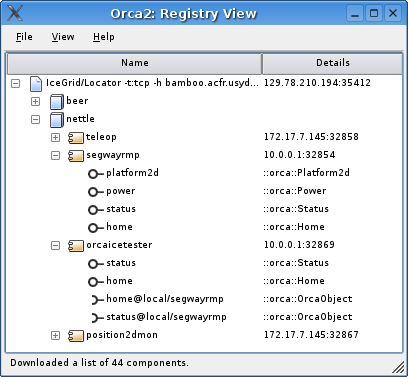
RegistryView
[Utilities, C++, Linux]
A graphical viewer for the Orca Component Model.
More...- Provides
- Requires
- IceGrid/Admin
- Home
- Operation
The information about the component is shown in a tree view, aggregated by platform and component. Several display options are available under the View menu.
- See also:
- RegistryList
- Dependancies
- Qt GUI library >=v.4.1
- Configuration
RegistryView.Config.RefreshInterval(float) [s]- Time interval between requests to Registry for a list of adapters.
- Valid values:
- t<0: Don't refresh automatically.
- t=0: Refresh as frequently as possible (don't do it!)
- t>0: Normal operation.
- Default: 120.0
Ice.Override.ConnectTimeout(int) [ms]- The operation of this utility depends on time-out when the components listed in the registry are not reachable.
- Default: 150
An example configuration file is installed into [ORCA-INSTALL-DIR]/share/orca/cfg/ directory.
- Authors
- Alex Makarenko
