orca-robotics

INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
REPOSITORY
Interfaces
Components
Libraries
Utilities
Software Map
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
Wiki
login/pass: orca/orca
PEOPLE
Contributors
Users
Project
Download
Mailing lists
Cross-OS operation: Linux and Windows
- Note:
- Reviewed for release 2.10.0.
Start Up the Infrastructure in Linux
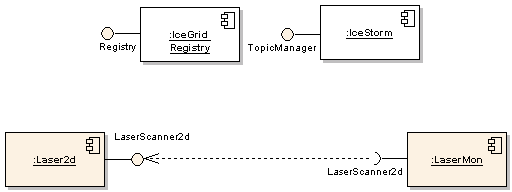
Start the IceGrid Registry and the IceStorm server on a Linux machine just as before (See Quick-Start Guide for instructions).Connect Two Components
First, copy default configuration files for the Laser2d and LaserMon components.$ mkdir -p ~/sys/tutedirect; cd ~/sys/tutedirect $ cp [ORCA-INSTALL]/share/orca/cfg/laser2d.cfg . $ cp [ORCA-INSTALL]/share/orca/cfg/lasermon.cfg .
- The Server on Linux
$ cd ~/sys/quickstart $ laser2d
- The Client on Windows
>cd C:\ >mkdir sys >cd sys >mkdir tutewin >cd tutewin >copy [ORCA-INSTALL]\cfg\lasermon.cfg .
We have to modify the configuration file because the server now runs on a different platform (host). Replace [HOSTNAME] with the hostname of the Linux machine on which the server is running.
# Required Interfaces LaserMon.Requires.Laser.Proxy=laserscanner2d@[HOSTNAME]/laser2d
Start the client (here we assume that [ORCA-INSTALL] is in the PATH).
>lasermon.exe
You should see the scans scroll by on the screen, just as in the Starting Up the Infrastructure tutorial. If you see a dialog box from the Windows Firewall, you'll have to disable the firewall from the control panel.
To stop components, type Ctrl-C.
