orca-robotics

INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
REPOSITORY
Interfaces
Components
Libraries
Utilities
Software Map
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
Wiki
login/pass: orca/orca
PEOPLE
Contributors
Users
Project
Download
Mailing lists
Deploying components with the IceGrid Node
- Note:
- Reviewed for release 2.10.0.
IceGrid is the location and activation service for Ice applications. For more information refer to the IceGrid Chapter of the Ice manual.
Start Up the Infrastructure
- IceGrid Registry
- IceGrid Node
$ mkdir -p ~/sys/icenode; cd ~/sys/icenode $ cp [ORCA-SRC]/scripts/ice/icegridnode.cfg . $ mkdir db $ icegridnode --Ice.Config=icegridnode.cfg
- IceStorm Service
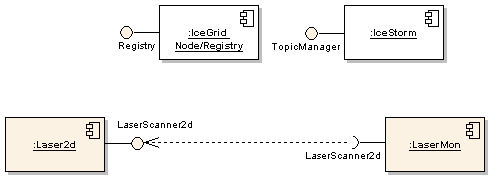
Getting Two Components Talking
First, copy default configuration files for the Laser2d and LaserMon components.$ mkdir -p ~/sys/tuteicegrid; cd ~/sys/tuteicegrid $ cp [ORCA-INSTALL]/xml/laser2d.xml . $ cp [ORCA-INSTALL]/share/orca/cfg/lasermon.cfg .
- The Server
laser2d.xml to change the value of Laser2d.DriverLib to "libHydroLaserScanner2dFake.so". Also replace platform name 'local' to the hostname of your computer in the string for adapter ID. In the example below, the hostname is 'agave'. (This needs to be done because, unlike the Orca components, IceGrid will not resolve the string 'local' to the honstname). ... <adapter name="Laser2d" register-process="true" id="agave/laser2d"/> ... <property name="Laser2d.Config.Driver" value="fake"/> ...
Load the application described in laser2d.xml into the IceGrid Node using icegridadmin utility.
$ icegridadmin --Ice.Default.Locator="IceGrid/Locator:default -p 12000" -e "application add 'laser2d.xml'"
- The Client
$ lasermon
You should see the scans scroll by on the screen, just as in the Starting Up the Infrastructure tutorial. To stop the client component, type Ctrl-C in its terminal window. To stop the server you can Ctrl-C the IceGrid Node itself or send a remote command like this.
$ icegridadmin --Ice.Default.Locator="IceGrid/Locator:default -p 12000" -e "application remove OrcaApp"
What's Next
For an example of running IceStorm through IceGrid, seeIf everything works, check out more Orca Tutorials.
