orca-robotics

INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
REPOSITORY
Interfaces
Components
Libraries
Utilities
Software Map
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
Wiki
login/pass: orca/orca
PEOPLE
Contributors
Users
Project
Download
Mailing lists
Performance of Orca Components
- Note:
- Reviewed for release 2.2.0.
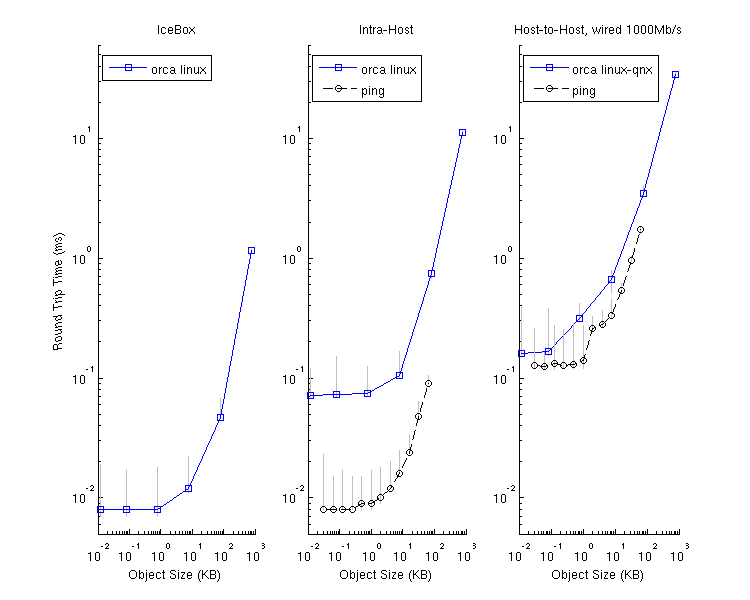
The tests we perform are slightly different and reflect the typical usage of our components: frequent transfer of small to medium size messages. Here we provide some numbers on round trip time (RTT) for sending messages of various sizes. The plots below show average RTT for sending 100 objects with an interval of 0.25s. Vertical bars show min and max values. Ping results are shown for comparison.
- Hardware
- Computers: rack-mounted servers with Intel DG965RY motherboards, with 2-core 2.13GHz Intel Core-2 Duo 6400.
- Network: 1000Mb/s Ethernet using a LinkSys switch.
- Software
- Linux: Kubuntu 6.10. Kernel 2.6.17-10.
- QNX: Neutrino 6.2.3.
Ice v.3.1.1
- Compiled with default options.
Orca v.2.2.0
- Compiled compiled with CMAKE_BUILD_TYPE=Release (translates to -O3 for gcc).
- Test components orca_test_pinger and orca_test_replier.
- Objects
- Procedure
- UNIX ping for comparison
$ ping host -c 100 -s 8 -i 0.25 -q $ ping host -c 100 -s 24 -i 0.25 -q ... $ ping host -c 3 -s 32760 -i 0.25 -q $ ping host -c 3 -s 65499 -i 0.25 -q
