orca-robotics

INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
REPOSITORY
Interfaces
Components
Libraries
Utilities
Software Map
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
Wiki
login/pass: orca/orca
PEOPLE
Contributors
Users
Project
Download
Mailing lists
Suggestions on the Internal Component Structure
- Note:
- Reviewed for release 2.0.0.
libOrcaIce. Several of the components in the repository are designed in this way.A basic component template looks like this:
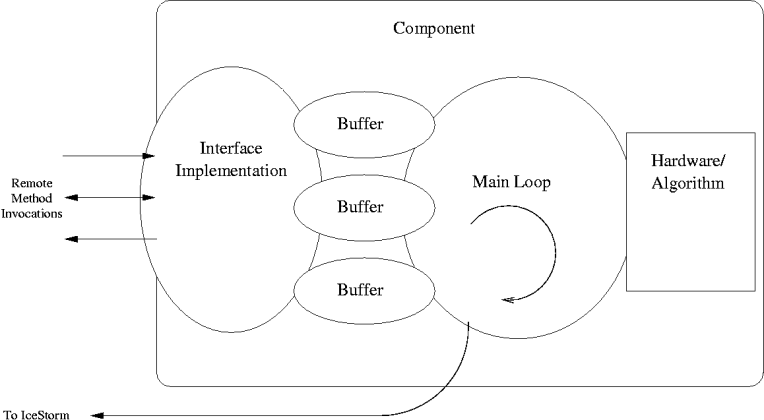
The main pieces are:
- Component
This the main class which instantiates and contains the other pieces. Deriving from orcaice::Component makes it easy to place it within either a stand-alone application or an IceBox Service.
To implement an orcaice::Component, the 'start()' and 'stop()' functions must be implemented.
- Interface Implementation
MyInterface is called MyInterfaceI. The files are named myinterface.h and myinterface.cpp.Remote Method Invocations arrive asynchronously from the outside world or from the Main Loop. Requests from the outside world can be answered using the information in the thread-safe buffers.
- Buffers
- Main Loop
MainLoop's job is to be an intermediary between Hardware/Algorithm and Interface_Implementation (via the Buffers). A loop might look somthing like this (going vaguely clockwise in the figure):
- Check if new requests have arrived at the Buffers
- Hand the request(s) to the Hardware/Algorithm
- Read the data information generated by the Hardware/Algorithm (a blocking call)
- Send that data to the world via IceStorm
- Hand the data to the Buffers so the world can query it directly
- Goto step 1
- Hardware/Algorithm
The purpose of this design is try to separate (a) network communication, (b) sequence of control (including setup/shutdown, component life-cycle), and (c) the algorithm or hardware driver itself.
