orca-robotics

INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
REPOSITORY
Interfaces
Components
Libraries
Utilities
Software Map
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
Wiki
login/pass: orca/orca
PEOPLE
Contributors
Users
Project
Download
Mailing lists
libOrcaIce
[Libraries]
Customizes Ice API for Orca.
More...- Development status
- Used by all components, API is fairly stable.
Overview
This library aims at simplifying Orca component development. It provides several helper classes to use and derive from and several functions to use. In doing so we make unavoidable assumptions about how Ice is going to be used in Orca components. If your component cannot live with these constraints you can always go back to using Ice directly (it's not much more work).For a full list of functions and classes see see the complete documentation for the orcaice namespace.
Header file:
#include <orcaice/orcaice.h>
Class Usage
Here's what our stand-alone component looks like. In this figure and the one below, white color stands for standard Ice objects which we don't modify, e.g. the Communicator -- the Ice run-time object. Gray color stands for the objects which come with libOrcaIce and used unmodified by component developers. Cream color stands for component-specific code, written by component developers.
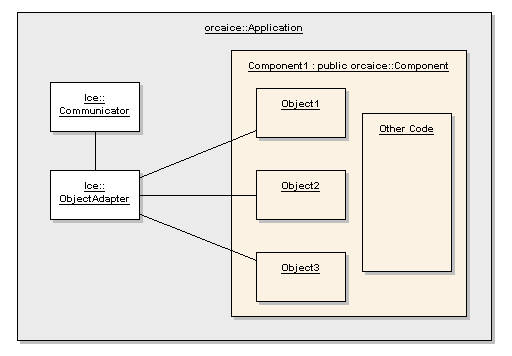
Here's what an IceBox service looks like. The main idea is to have the guts of the component used unmodified in both stand-alone and application server environment.
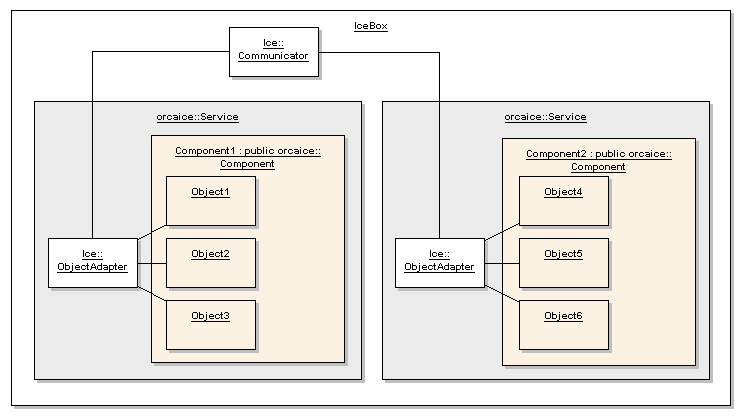
Note that 'Component1' code is identical in both cases -- that's a big time saver!
Function Usage
The functions described here are very high-level. They are intended as one-line wrappers which work in typical situations. If your usage does not fit the pattern, no worries: just look how they are implemented, copy the code into your program and modify it as needed.In the discussion below, we assume here that the library functions are called from inside a class derived from orcaice::Component. You can see more output from libOrcaIce by setting orcaice::Tracer verbosity for info, warning, and error to 2.
- To create a Provided Interface
Ice::MyInterfacePtr obj = new MyInterfaceI; orcaice::createInterfaceWithTag( context(), obj, "MyConfigFileTag" );
The interface tag in this example is "MyConfigFileTag". The function context() summarizes the context of your component (pointers to Communicator, Adapter, etc.). The function orcaice::createInterfaceWithTag adds the newly created interface implementation to the component's adapter, thereby making it reachable over the network.
- To start publishing to IceStorm
orca::MyInterfaceConsumerPrx publisher; orcaice::connectToTopicWithTag <orca::MyObjectConsumerPrx> ( context(), publisher, "MyConfigFileTag" );
- To connect to a Required Interface
orca::YourObjectPrx yourObjectPrx; orcaice::connectToInterface<orca::YourObjectPrx>( context(), yourObjectPrx, "MyConfigFileTag" );
- To subscribe to an IceStorm topic
Configuration
The following properties are assigned defaults unless they are configured explicitely:
IceStorm.TopicManager.Proxy(string)- Default: "IceStorm/TopicManager:default -p 10000"
[ComponentTag].AdapterId (string)- Default: "[platform name]/[component name]"
[ComponentTag].Endpoints (string)- Default: "tcp -t 5000"
Behavior of libOrcaIce functions and classes can be influenced by setting several configuration parameters.
Orca.PrintProperties(bool)- Print out all properties passed to the component? Includes hardwired defaults, global settings, properties from the component configuration file, and command line options.
- Default: 0
Orca.PrintComponentStarted(bool)- If this property is set to 1, a statement is printed to standard output when component initialization is complete.
- Default: 0
Orca.RequireRegistry(bool)- When component activates it tries to register its adapter with the Registry. If it cannot connect (e.g. Registy is not running) it gets an exception. When indirect binding (using names) is used this makes a component with provided interfaces useless because nobody can connect to it. In this case requiring registry makes sense and the component should exit at this point. There are cases however when you may want to ignore this and continue with the startup.
- Default: 1
Orca.Warn.DefaultProperty(bool)- If this property is set to 1, a warning is printed every time a default property is used when calling *WithDefault() functions. e.g. orcaice::getPropertyAsIntWithDefault().
- Default: 1
Orca.Warn.FactoryProperty(bool)- If this property is set to 1, a warning is printed when a factory default is used. This applies only during component initialization.
- Default: 0
- See also:
- orcaice::Tracer configuration.
# Ice config Ice.Default.Locator=IceGrid/Locator: default -p 12000 #Ice.Default.Locator=IceGrid/Locator: default: default -h host.xxx.xxx.xxx -p 12000 # Orca config Orca.PrintProperties=0 Orca.PrintComponentStarted=0 Orca.RequireRegisty=1 # Orca warnings Orca.Warn.DefaultProperty=1 Orca.Warn.FactoryProperty=0 # Orca Tracer config Orca.Tracer.RequireIceStorm=0 Orca.Tracer.Filename=orca_component_trace.txt Orca.Tracer.InfoToDisplay=1 Orca.Tracer.InfoToNetwork=0 Orca.Tracer.InfoToLog=0 Orca.Tracer.InfoToFile=0 Orca.Tracer.WarningToDisplay=1 Orca.Tracer.WarningToNetwork=0 Orca.Tracer.WarningToLog=0 Orca.Tracer.WarningToFile=0 Orca.Tracer.ErrorToDisplay=10 Orca.Tracer.ErrorToNetwork=0 Orca.Tracer.ErrorToLog=0 Orca.Tracer.ErrorToFile=0 Orca.Tracer.DebugToDisplay=0 Orca.Tracer.DebugToNetwork=0 Orca.Tracer.DebugToLog=0 Orca.Tracer.DebugToFile=0 Orca.Tracer.Timestamp=1
- Responsible Developer
- Alex Brooks, Alex Makarenko
