
INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
NONFRAMEWORK CODE
Driver Interfaces
Drivers
Libraries
Utilities
FRAMEWORK CODE
Interfaces
Components
Libraries
Utilities
Full Software Listings
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
PEOPLE
Contributors
Users
Project
Download
Mailing lists
SegwayRmp
[Components, Stand-Alone Components, IceBox Services, C++, Linux, QNX]
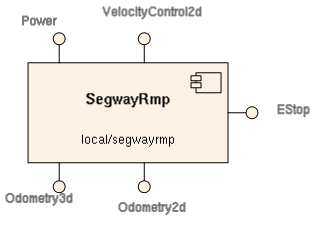
Controls Segway RMP: a two-wheeled balancing robot. More...
Controls Segway RMP: a two-wheeled balancing robot.
- Provides
- orca_interface_home
- orca_interface_odometry2d [SegwayRmp.Provides.Odometry2d]
- orca_interface_odometry3d [SegwayRmp.Provides.Odometry3d]
- orca_interface_velocitycontrol2d [SegwayRmp.Provides.VelocityControl2d]
- orca_interface_power [SegwayRmp.Provides.Power]
- orca_interface_estop
- orca_interface_status
- orca_interface_tracer
- Drivers
This component dynamically loads an implementation of a Hydro hardware interface hydrointerfaces::SegwayRmp. You can also load your own implementation as long as the shared library is in the path. See Hydro documentation for the list of available drivers.
- Configuration
SegwayRmp.Config.DriverLib(string)- Name of shared library containing the hardware driver
- Valid options are { 'libHydroSegwayRmpAcfrCan.so', 'libHydroSegwayRmpAcfrUsb.so', 'libHydroSegwayRmpPlayerClient.so', 'libHydroSegwayRmpFake.so' }
- Default: 'libHydroSegwayRmpAcfrCan.so'
SegwayRmp.Config.EnableMotion(bool)- Allow motion commands or not. Convinient for testing when you want to make sure that the platform will not move.
- Default: 1
SegwayRmp.Config.DriveInReverse(bool)- If set, reverse all controls and odometry (to all the RMP to be driven in reverse as though it were driving forward).
- Default: 0
SegwayRmp.Config.Odometry2dPublishInterval(double) [s]- How often to send 2D odometry information to the IceStorm server
- Valid values:
- t<0 : send every new data point
- t>0 : send approximately every t seconds
- Default: 0.1 (10Hz)
SegwayRmp.Config.Odometry3dPublishInterval(double) [s]- How often to send 3D odometry information to the IceStorm server. Set this to a high value if you don't use 3D information and are concerned about bandwidth/cpu load.
- Valid values:
- t<0 : send every new data point
- t>0 : send approximately every t seconds
- Default: 0.1 (10Hz)
SegwayRmp.Config.PowerPublishInterval(double) [s]- How often to send power information to the IceStorm server
- Valid values:
- t>0 : send approximately every t seconds
- Default: 20.0
SegwayRmp.Config.StatusPublishInterval(double) [s]- How often to send status information to the IceStorm server
- Valid values:
- t>0 : send approximately every t seconds
- Default: 60.0
SegwayRmp.Config.EnableEStop(bool)- If true, instantiate monitor the EStop interface.
- Default: 0
SegwayRmp.Config.EStop.KeepAlivePeriodSec(double) [s]- How frequently keep-alives need to arrive to keep the vehicle happy.
- Default: 3
Parameters describing the vehicle (see orca::VehicleDescription for details)
SegwayRmp.Config.VehicleDescription.Control.Type(string)- valid values: 'VelocityDifferential'
- Default: 'VelocityDifferential'
SegwayRmp.Config.VehicleDescription.Control.VelocityDifferential.MaxForwardSpeed(m/s)- Default: 1.0
SegwayRmp.Config.VehicleDescription.Control.VelocityDifferential.MaxReverseSpeed(m/s)- valid values: must be same as forward speed.
- Default: 1.0
SegwayRmp.Config.VehicleDescription.Control.VelocityDifferential.MaxTurnrate(deg/s)- Absolute max turnrate (assumed max turnrate at 0m/s)
- Default: 45.0
SegwayRmp.Config.VehicleDescription.Control.VelocityDifferential.MaxLateralAcceleration(m/s/s)- Max centripital acceleration during a turn (limits max turnrate at speed).
- See orca_interface_vehicleDescription
- Default: 4.9050
- Max centripital acceleration during a turn (limits max turnrate at speed).
SegwayRmp.Config.VehicleDescription.Control.VelocityDifferential.MaxForwardAcceleration(m/s/s)- Default: 9.0
SegwayRmp.Config.VehicleDescription.Control.VelocityDifferential.MaxReverseAcceleration(m/s/s)- Default: 9.0
SegwayRmp.Config.VehicleDescription.Control.VelocityDifferential.MaxRotationalAcceleration(deg/s/s)- Default: 45.0
SegwayRmp.Config.VehicleDescription.Geometry.Type(string)- valid values: 'Cylindrical'
- Default: 'Cylindrical'
SegwayRmp.Config.VehicleDescription.Geometry.Cylindrical.Radius(m)- Radius of the vehicle's bounding cylinder
- Default: 0.25
SegwayRmp.Config.VehicleDescription.Geometry.Cylindrical.Height(m)- Height of the vehicle's bounding cylinder
- Default: 1.0
SegwayRmp.Config.VehicleDescription.Geometry.Cylindrical.PlatformToGeometryTransform(Frame3d) [m, deg]- Position of the cylinder centre with respect to the platform's local coord system. (cylinder extends in +/- z direction from here)
- Format: x y z roll pitch yaw (space separated)
- Default: 0.0 0.0 0.35 0.0 0.0 0.0
- See also:
- Individual drivers may have additional configuration parameters which are specified as SegwayRmp.Config.XXX. See driver documentation.
An example configuration file is installed into [ORCA-INSTALL-DIR]/share/orca/cfg/ directory.
- Authors
Alex Makarenko & Alex Brooks.
