
INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
NONFRAMEWORK CODE
Driver Interfaces
Drivers
Libraries
Utilities
FRAMEWORK CODE
Interfaces
Components
Libraries
Utilities
Full Software Listings
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
PEOPLE
Contributors
Users
Project
Download
Mailing lists
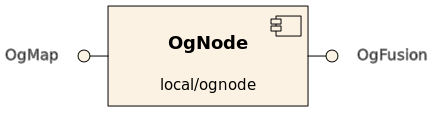
OgNode
[Components, Stand-Alone Components, IceBox Services, C++, Linux, QNX]
Fuses sequences of occupancy likelihoods. More...
Fuses sequences of occupancy likelihoods.
- Provides
- orca_interface_home
- orca_interface_ogfusion [OgNode.Provides.OgFusion]
- orca_interface_ogmap [OgNode.Provides.OgMap]
- orca_interface_status
- Requires
- none
- Operation
This component fuses ogcell sequences from OgFusionData objects (from a Laser2Og component) The result is available as an OgMap interface.
- Configuration
OgNode.Config.PriorMapProxyString(string)- Proxy string of OgMap interface from which to get prior map
- If not equal to 'none', the details of the OgMap obtained from the remote interface will be used instead of the OgNode.Config.Map parameters.
- Default: none
OgNode.Config.Map.SizeXMetres(double) [m]- Size of map in metres (X)
- Default: 50.0
OgNode.Config.Map.SizeYMetres(double) [m]- Size of map in metres (Y)
- Default: 50.0
OgNode.Config.Map.ResX(double) [m]- The Map resolution in metres per Cell in X-direction
- Default: 0.5
OgNode.Config.Map.ResY(double) [m]- The Map resolution in metres per Cell in Y-direction
- Default: 0.5
OgNode.Config.Map.OriginX(double) [m]- The origin of the map (bottom-left corner) in metres (X)
- Default: -25.0
OgNode.Config.Map.OriginY(double) [m]- The origin of the map (bottom-left corner) in metres (Y)
- Default: -25.0
OgNode.Config.Map.Orientation(double) [deg]- The orientation of the map in degrees
- Default: 0.0
OgNode.Config.MaxPushPeriodSec(double) [sec]- The maximum rate at which we'll publish maps.
- Default: 1.0 sec
- Authors
- Matthew Ridley
