
INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
NONFRAMEWORK CODE
Driver Interfaces
Drivers
Libraries
Utilities
FRAMEWORK CODE
Interfaces
Components
Libraries
Utilities
Full Software Listings
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
PEOPLE
Contributors
Users
Project
Download
Mailing lists
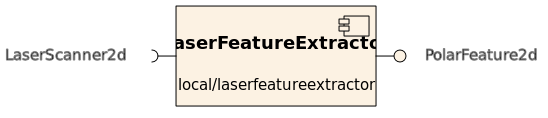
LaserFeatureExtractor
[Components, Stand-Alone Components, IceBox Services, C++, Linux]
Extracts interesting features from laser scans. More...
Extracts interesting features from laser scans.
- Provides
- orca_interface_home
- orca_interface_polarfeature2d [LaserFeatureExtractor.Provides.PolarFeature2d]
- orca_interface_status
- Requires
- orca_interface_laserscanner2d [LaserFeatureExtractor.Requires.LaserScanner2d]
- Drivers
This component dynamically loads an implementation of a Hydro interface hydrointerfaces::LaserFeatureExtractor. You can also load your own implementation as long as the shared library is in the path. See Hydro documentation for the list of available drivers.
- Configuration
LaserFeatureExtractor.Config.DriverLib(string)- Name of shared library containing the driver
- Valid values are at least: { 'libHydroLaserFeatureExtractorCombined.so' }
- Default: "libHydroLaserFeatureExtractorCombined.so"
An example configuration file is installed into [ORCA-INSTALL-DIR]/share/orca/cfg/ directory.
- Authors
- Alex Brooks
