
INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
NONFRAMEWORK CODE
Driver Interfaces
Drivers
Libraries
Utilities
FRAMEWORK CODE
Interfaces
Components
Libraries
Utilities
Full Software Listings
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
PEOPLE
Contributors
Users
Project
Download
Mailing lists
Laser2Og
[Components, Stand-Alone Components, IceBox Services, C++, Linux, QNX]
Generates Occupancy Grid cell likelihoods from raw range scans. More...
Generates Occupancy Grid cell likelihoods from raw range scans.
- Provides
- orca_interface_home
- orca_interface_status
- Requires
- orca_interface_localise2d [Laser2Og.Requires.Localisation]
- orca_interface_ogfusion [Laser2Og.Requires.OgFusion]
- orca_interface_rangescanner2d [Laser2Og.Requires.Observations]
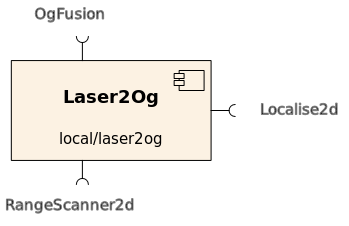
- Operation
This component generates OgCellLikelihood sequences using range scans from a globally localized range scanner.
Note: can NOT generate likelihoods if orca_interface_localise2d interface contains more than 1 hypothesis.
- Configuration
Laser2Og.Config.Sensor.Size(int)- Number of elements in sensor model
- Default: 101
Laser2Og.Config.Sensor.OccupMax(double)- Default: 0.575
Laser2Og.Config.Sensor.EmptyMax(double)- Default: 0.425
Laser2Og.Config.Sensor.RangeStDev(double) [m]- Range standard deviation
- Default: 0.1
Laser2Og.Config.Sensor.RangeStDevMax(double) [m]- Maximum range standard deviation
- Default: 3.0
Laser2Og.Config.Sensor.PosStDevMax(double) [m]- Maximum tolerated position uncertainty
- Default: 5.0
Laser2Og.Config.Sensor.HedStDevMax(double) [deg]- Maximum tolerated heading uncertainty
- Default: 5.0
- Authors
- Matthew Ridley
- Tobias Kaupp
