
INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
NONFRAMEWORK CODE
Driver Interfaces
Drivers
Libraries
Utilities
FRAMEWORK CODE
Interfaces
Components
Libraries
Utilities
Full Software Listings
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
PEOPLE
Contributors
Users
Project
Download
Mailing lists
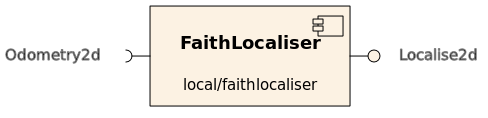
FaithLocaliser
[Components, Stand-Alone Components, IceBox Services, C++, Linux, QNX]
A simple component that produces localisation info from 2D odometry. More...
A simple component that produces localisation info from 2D odometry.
- Provides
- orca_interface_home
- orca_interface_localise2d [FaithLocaliser.Provides.Localise2d]
- Requires
- orca_interface_odometry2d [FaithLocaliser.Requires.Odometry2d]
- Operation
This component takes odometry information and produces localisation information. No filtering is performed: instead, the component trusts that the odometry is perfect, and that it is reported in the global coordinate system. For real robots, both of these assumptions will be incorrect.
The component is useful when working in simulation however. For example, odometry in the Stage simulator can be set to "gps" mode (ie perfect odometry, in the global coordinate system).
To do this if you are using stage's simple.world you need to add the following lines in the worlds/player.inc file
localization "gps"
localization_origin [0 0 0]
within the "define pioneer2dx position" braces
- Configuration
- An example configuration file is installed into [ORCA-INSTALL-DIR]/share/orca/cfg/ directory.
- Authors
- Alex Brooks
