
INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
NONFRAMEWORK CODE
Driver Interfaces
Drivers
Libraries
Utilities
FRAMEWORK CODE
Interfaces
Components
Libraries
Utilities
Full Software Listings
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
PEOPLE
Contributors
Users
Project
Download
Mailing lists
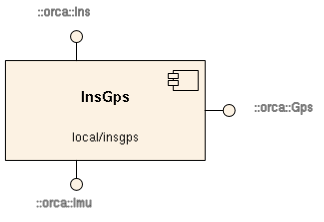
InsGps
[Components, Stand-Alone Components, IceBox Services, C++, Linux]
A hardware abstraction component for InsGps systems. More...
A hardware abstraction component for InsGps systems.
- Provides
- orca_interface_home
- orca_interface_ins
- orca_interface_gps
- orca_interface_imu
- orca_interface_status
- Requires
- none
- Drivers
- novatelspan insgps_novatel (not yet implemented)
- fake Useful for testing or if you don't have hardware or a simulator.
This component encapsulates an Inertial Navigation System that is coupled with GPS. In particular, the SPAN systems from Novatel which includes a Novatel Gps receiver and Honeywell IMU.
- Features
- This component provides three interfaces. The first interface (ins) is more for a complete Inertial Navigation System in which the position, velocity, and attitude (PVA) information is output. The second interface (imu) provides raw imu information that all physical intertial measurement units should output. The third (gps) are global gps coordinates.
!stuff below is old!
- Configuration
InsGps.Config.Driver(string)- See introduction.
- Valid values: { "novatelspan", "fake" }
- Default: "fake"
InsGps.Config.StartEnabled(bool)- Enable the InsGps on component initialisation?
- Default: 1
Description
InsGps.Config.Gps.Offset(Frame2d) [m,m,deg]- Transformation from global (arbitrarily defined) coordinate system (CS) to the GPS MapGrid CS
- Format: x y yaw (space separated)
- Default: [0.0 0.0 0.0]
InsGps.Config.Gps.AntennaOffset(Frame3d) [m,m,m,deg,deg,deg]- Format: x y z roll pitch azimuth(yaw) (space separated)
- Default: [0.0 0.0 0.0 0.0 0.0 0.0]
InsGps.Config.Imu.Offset(Frame3d) [m,m,m, deg,deg,deg]- Offset of the IMU from the robot's local coord system
- Format: x y z roll pitch yaw (space separated)
- Default: [0.0 0.0 0.0 0.0 0.0 0.0]
InsGps.Config.Imu.Size(Size3d) [m,m,m]- Physical dimensions of the IMU device.
- Format: length width height (space separated)
- Default: [0.0 0.0 0.0]
InsGps.Config.Device(string)- The device to use
- Example values: /dev/ttyS0 (for linux)
- Default: "/dev/ttyS0"
InsGps.Config.Baud(int)- Baud rate
- Default: 9600
An example configuration file is installed into [ORCA-INSTALL-DIR]/share/orca/cfg/ directory.
Novatel Span system
- Hardware
- tested with a Novatel ProPak G2-plus GPS receiver and a SPAN compatible Novatel AG17 enclosure which houses a Honeywell HG1700 IMU.
- Extra configuration
InsGps.Config.Novatel.ImuToGpsAntennaOffset(CartesianPoint) [m,m,m]- Distance from the centre of the imu to the phase centre of the gps antenna.
Note that this is different from the Gps.AntennaOffset which is the lever arm between the vehicle and antenna, not imu and antenna.
- Format: x y z (space separated)
- Default: [0.0 0.0 0.0]
InsGps.Config.Novatel.ImuToGpsAntennaOffsetUncertainty(CartesianPoint) [m,m,m]- Imu/Gps antenna offset uncertainty
- Format: (standard deviation in x) (std dev in y) (std dev in z) (space separated)
- Default: [0.0 0.0 0.0]
InsGps.Config.Novatel.ImuOrientation (int)
- Imu mounting orientation
- Format: c (constant passed to imu in setimuorientation command -- see imu documentation)
- Default: 0
InsGps.Config.Novatel.VehicleBodyRotation (CartesianPoint)
- Magic numbers that specify orientation of imu relative to the vehicle. We should eventually be able to determine this from imu offset parameter, but we haven't figured this out yet. Read as a CartesianPoint but it's really roll, pitch, yaw angles
- Format: roll pitch yaw (magic numbers -- see imu documentation for vehiclebodyrotation command)
- Default: [0 0 0]
InsGps.Config.Novatel.VehicleBodyRotationUncertainty (CartesianPoint)
- Uncertainty in vehiclebodyrotation command
- Format: (roll uncertainty) (pitch uncertainty) (yaw uncertainty)
- Default: [0 0 0]
InsGps.Config.Novatel.SwappedRollPitch (bool)
- Adapt Novatel output coordinate system to Orca's.
- Default: 1
- Authors
- Ben Upcroft, Matthew Ridley, Michael Moser
