
INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
NONFRAMEWORK CODE
Driver Interfaces
Drivers
Libraries
Utilities
FRAMEWORK CODE
Interfaces
Components
Libraries
Utilities
Full Software Listings
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
PEOPLE
Contributors
Users
Project
Download
Mailing lists
Closed-loop control of a robot simulated with Player/Stage
- Note:
- Reviewed for release 2.10.0.
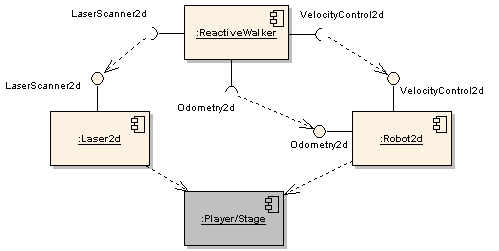
In this tutorial we will connect a simple controller to a robot simulated using 2-D Player/Stage simulator. The system diagram is shown below (IceGrid Registry and IceStorm are not shown).
In this tutorial we will use components which have external dependencies.
- Player/Stage to simulate the robotic platform. Debian installation instructions for Player can be found in orca_doc_installdebian. This tutorial was tested with Player/Stage version 2.0.4. (note: as of writing the Player Debian package does not properly install its dependencies. If something does not work, write to the Player mailing list or install from source.)
Starting Orca
Start IceGrid Registry and IceStorm server as described in the Quick-Start Guide.
Create a new system directory and copy Orca sample files.
$ mkdir -p ~/sys/tuteteleop; cd ~/sys/tutereactive $ cp [ORCA-INSTALL]/share/orca/cfg/robot2d.cfg . $ cp [ORCA-INSTALL]/share/orca/cfg/laser2d.cfg . $ cp [ORCA-INSTALL]/share/orca/cfg/reactivewalker.cfg .
Starting Player/Stage
Copy Stage sample files.
$ cp -r [STAGE-SRC]/worlds .
Start up the Stage simulator with the simple world.
$ player worlds/simple.cfg
Components
- Sensor and actuator components
Follow the instructions from A bigger system with Player/Stage simulator on how to set and run Robot2d and orca_component_laserscanner2d components.
- Controller component
We'll use an example component ReactiveWalker. The config file which we've already copied over does not need to be modified. Start the controller component and watch the robot run (crawl) around the simulated world.
$ reactivewalker
What else?
Take a look at the source files for ReactiveWalker.
Check out more Orca Tutorials.
