orca-robotics

INTRODUCTION
Overview
Download and Install
Documentation
REPOSITORY
Interfaces
Drivers
Libraries
Utilities
Software Map
DEVELOPER
Dashboard
PEOPLE
Contributors
Users
Project
Download
Mailing lists
hydroutil::History Class Reference
Experimental! Storage of historical information about component's activities. More...
#include <history.h>
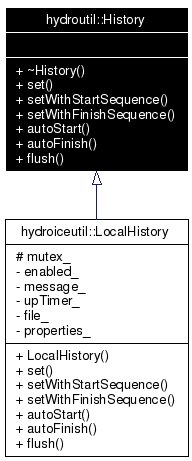
Inherited by hydroiceutil::LocalHistory.
Inheritance diagram for hydroutil::History:
Public Member Functions | |
| virtual void | set (const std::string &message)=0 |
| Sets the contents of the history without modifying the message. | |
| virtual void | setWithStartSequence (const std::string &message)=0 |
| Appends the message to the standard start sequence. | |
| virtual void | setWithFinishSequence (const std::string &message)=0 |
| Appends the message to the standard finish sequence. | |
| virtual void | autoStart (bool force=false)=0 |
| virtual void | autoFinish (bool force=false)=0 |
| virtual void | flush ()=0 |
| Write current contents to the storage medium and clear current history contents. | |
Detailed Description
Experimental! Storage of historical information about component's activities.
Member Function Documentation
|
|
Sets the contents of the history to the standard finish sequence. If the history is non-empty, nothing will be written unless the Implemented in hydroiceutil::LocalHistory. |
|
|
Sets the contents of the history to the standard start sequence. If the history is non-empty, nothing will be written unless the Implemented in hydroiceutil::LocalHistory. |
The documentation for this class was generated from the following file:
