
INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
NONFRAMEWORK CODE
Driver Interfaces
Drivers
Libraries
Utilities
FRAMEWORK CODE
Interfaces
Components
Libraries
Utilities
Full Software Listings
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
PEOPLE
Contributors
Users
Project
Download
Mailing lists
RegistryView
[Utilities, C++, Linux]
A graphical viewer for the Orca Component Model. More...
A graphical viewer for the Orca Component Model.
- Provides
- orca_interface_home
- Requires
- IceGrid/Admin
- orca_interface_home
- Operation
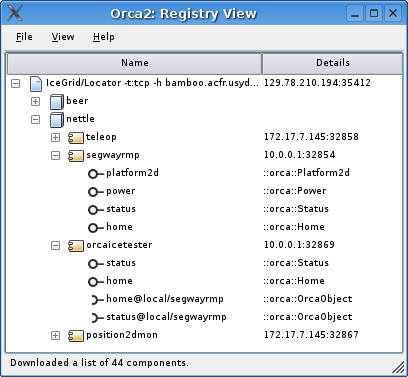
This component contacts the registry and gets a list of registered Orca components (Ice adapters). Then it tries to contact Home interface at every component. If successful, it gets a list of provided and required interfaces and displays them. If not successful, it assumes the component is not running or is unreachable.
The information about the component is shown in a tree view, aggregated by platform and component. Several display options are available under the View menu.
- See also:
- RegistryList
- Dependancies
- Qt GUI library >=v.4.1
- Configuration
RegistryView.Config.RefreshInterval(float) [s]- Time interval between requests to Registry for a list of adapters.
- Valid values:
- t<0: Don't refresh automatically.
- t=0: Refresh as frequently as possible (don't do it!)
- t>0: Normal operation.
- Default: 120.0
Ice.Override.ConnectTimeout(int) [ms]- The operation of this utility depends on time-out when the components listed in the registry are not reachable.
- Default: 150
An example configuration file is installed into [ORCA-INSTALL-DIR]/share/orca/cfg/ directory.
- Authors
- Alex Makarenko
