
INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
NONFRAMEWORK CODE
Driver Interfaces
Drivers
Libraries
Utilities
FRAMEWORK CODE
Interfaces
Components
Libraries
Utilities
Full Software Listings
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
PEOPLE
Contributors
Users
Project
Download
Mailing lists
Connecting components without the Registry
- Note:
- Reviewed for release 2.14.
In this tutorial we will reproduce the setup of the Quick-Start Guide but now without running the IceGrid Registry. The system diagram is shown below.
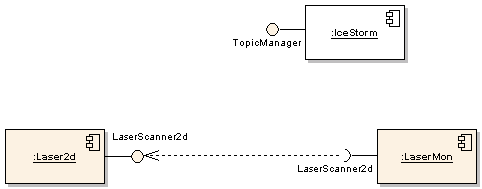
The client will connect to the server using so called direct connection method. This is equivalent to reaching a web server without the Domain Name Service (by using an IP address instead of a URL). You may want to do this if you do not want to use the IceGrid Registry for some reason.
Start Up the Infrastructure
Start the IceStorm server but make sure that the IceGrid Registry is NOT running (See Quick-Start Guide for instructions).
Modify the global configuration file ~/.orcarc to disable adapter registration (we comment out the line corresponding to the Locator info).
# Standard Ice Configuration for Orca #Ice.Default.Locator=IceGrid/Locator:default -p 12000
Connect Two Components
First, copy default configuration files for the Laser2d and LaserMon components.
$ mkdir -p ~/sys/tutedirect; cd ~/sys/tutedirect $ cp [ORCA-INSTALL]/share/orca/cfg/laser2d.cfg . $ cp [ORCA-INSTALL]/share/orca/cfg/lasermon.cfg .
- The Server
Edit laser2d.cfg file:
- Configure the component to accept connections on a specific port (we will use port 15000 in this tutorial) instead of a random one assigned by the operating system.
- Change driver library to
'libHydroLaserScanner2dFake.so'. - Tell the component to ignore the fact the registry is not there on activation by setting the
Orca.Component.RequireRegistryproperty to zero.
The config file should now contain the following lines:
Laser2d.Endpoints=tcp -t 5000 -p 15000 ... Laser2d.Config.DriverLib=libHydroLaserScanner2dFake.so ... Orca.Component.RequireRegistry=0
Start the server.
$ laser2d
- The Client
Start a new shell where we will run the client LaserMon. This time we have to tell it explicitely where to find the LaserScanner2d interface instead of relying on the Registry to supply this information. As in the case of the server, we disable registry pinging on activation. This lasermon.cfg file should contain these lines:
LaserMon.Requires.LaserScanner2d.Proxy=laserscanner2d:tcp -p 15000 ... Orca.Component.RequireRegistry=0
Start the client.
$ lasermon
You should see the scans scroll by on the screen, just as in the Quick-Start Guide tutorial.
What's Next
If everything works, check out more Orca Tutorials.
