orca-robotics

INTRODUCTION
Overview
Download and Install
Documentation
REPOSITORY
Interfaces
Drivers
Libraries
Utilities
Software Map
DEVELOPER
Dashboard
PEOPLE
Contributors
Users
Project
Download
Mailing lists
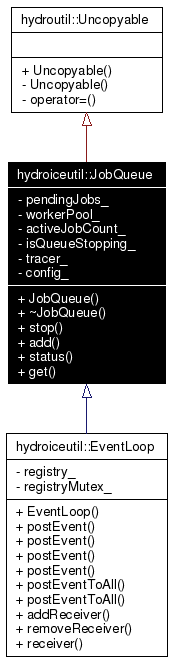
hydroiceutil::JobQueue Class Reference
A queue of jobs to be processed. More...
#include <jobqueue.h>
Inherits hydroutil::Uncopyable.
Inherited by hydroiceutil::EventLoop.
Inheritance diagram for hydroiceutil::JobQueue:
Public Member Functions | |
| JobQueue (gbxsickacfr::gbxutilacfr::Tracer &tracer, const Config &config=Config()) | |
| ~JobQueue () | |
| Calls stop() if any the worker threads are still running. | |
| void | stop () |
| void | add (const JobPtr &job) |
| Add request to execute a job. If add() is called after stop(), the request to add a job is quietly ignored. | |
| JobQueueStatus | status () |
| Returns current queue status. | |
Classes | |
| struct | Config |
| Job queue configuration structure. More... | |
Detailed Description
A queue of jobs to be processed.Rather than tie up the main thread, calls which may take a long time can be placed on this job queue. They will be processed by a pool of threads.
If you need the jobs to communicate results or status updates to their owners, you may want to use the event mechanism,
- See also:
- Event, EventReceiver.
- Author:
- Alex Brooks, Alex Makarenko
Constructor & Destructor Documentation
|
||||||||||||
|
Constructor. For queueSizeWarn>0, a warning will be traced when the queue size exceeds specified size. |
Member Function Documentation
|
|
Stops accepting new jobs, clears all pending jobs, cancels all running jobs and stops the worker pool. Use this function instead of relying on the destructor to call it if you need to make sure that the thread pool is stopped before other objects (e.g. threads) are destroyed. |
The documentation for this class was generated from the following files:
- jobqueue.h
- jobqueue.cpp
