orca-robotics

INTRODUCTION
Overview
Download and Install
Documentation
REPOSITORY
Interfaces
Drivers
Libraries
Utilities
Software Map
DEVELOPER
Dashboard
PEOPLE
Contributors
Users
Project
Download
Mailing lists
hydroiceutil::Job Class Reference
#include <jobqueue.h>
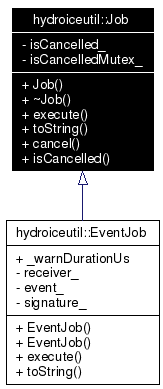
Inherited by hydroiceutil::EventJob, InfiniteJob, and TestJob.
Inheritance diagram for hydroiceutil::Job:
Public Member Functions | |
| virtual void | execute ()=0 |
| virtual std::string | toString () const =0 |
| Returns a text description of the job. | |
| void | cancel () |
| bool | isCancelled () |
| Returns TRUE if the thread is in Cancelled state, FALSE otherwise. | |
Detailed Description
A request to perform an operation which may take a long time (eg network job).Job implementation must interrupt execution when the the job is cancelled. Check isCancelled() periodically.
Member Function Documentation
|
|
Cancel this job. Execution should stop. What to do in this case is job-dependent. Depending on the state in which the job is finished, it may be necessary to inform somebody about what did and did not happen. |
|
|
Implement this function and do your job in it. It will be done by one of the 'workers' from the queue's thread pool. Implemented in hydroiceutil::EventJob. |
The documentation for this class was generated from the following files:
- jobqueue.h
- jobqueue.cpp
