orca-robotics

INTRODUCTION
Overview
Download and Install
Quick Start
Documentation
Publications
REPOSITORY
Interfaces
Components
Libraries
Utilities
Software Map
DEVELOPER
Tutorials
Examples
Dev Guide
Dashboard
Wiki
login/pass: orca/orca
PEOPLE
Contributors
Users
Project
Download
Mailing lists
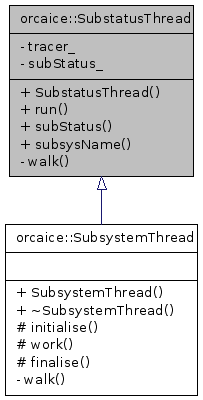
orcaice::SubstatusThread Class Reference
A version of the Thread class which catches all possible exceptions and integrates some Status operations. More...
#include <substatusthread.h>
Inheritance diagram for orcaice::SubstatusThread:
Public Member Functions | |
| SubstatusThread (gbxutilacfr::Tracer &tracer, gbxutilacfr::Status &status, const std::string &subsysName="SubstatusThread") | |
| virtual void | run () |
| gbxutilacfr::SubStatus & | subStatus () |
| Access to subsystem status. | |
| std::string | subsysName () const |
| Returns subsystem name assigned to this thread. | |
Detailed Description
A version of the Thread class which catches all possible exceptions and integrates some Status operations.If an exception is caught when the thread is not stopping, a status fault is issued. Then the thread will wait for someone to call stop().
To use this class, simply implement the pure virtual walk() function.
void MyThread::walk()
{
// initialize
// main loop
while ( !isStopping() )
{
// do something
}
// clean up
}
Constructor & Destructor Documentation
| SubstatusThread::SubstatusThread | ( | gbxutilacfr::Tracer & | tracer, | |
| gbxutilacfr::Status & | status, | |||
| const std::string & | subsysName = "SubstatusThread" | |||
| ) |
Supply an optional Tracer and Status. The optional subsysName is used in reporting status changes as the subsystem name.
Member Function Documentation
| void SubstatusThread::run | ( | ) | [virtual] |
This implementation calls walk(), catches all possible exceptions, prints out errors and waits for someone to call stop().
References subStatus(), and subsysName().
The documentation for this class was generated from the following files:
- substatusthread.h
- substatusthread.cpp
